Vision of a Future
Вы наверняка знаете про Mapbox Vision SDK. Удивительная библиотека, которая прямо на устройстве прогоняет видео с телефонной камеры через нейронную сеть. Ищет в кадре машины, пешеходов и знаки, размечает кадр попиксельно, рисует на экране маршрут и напоминает об ограничениях. Продвинутый видеорегистратор. Видеоролик лучше любого описания: да, техника дошла, будущее уже в телефоне и почти не тормозит.
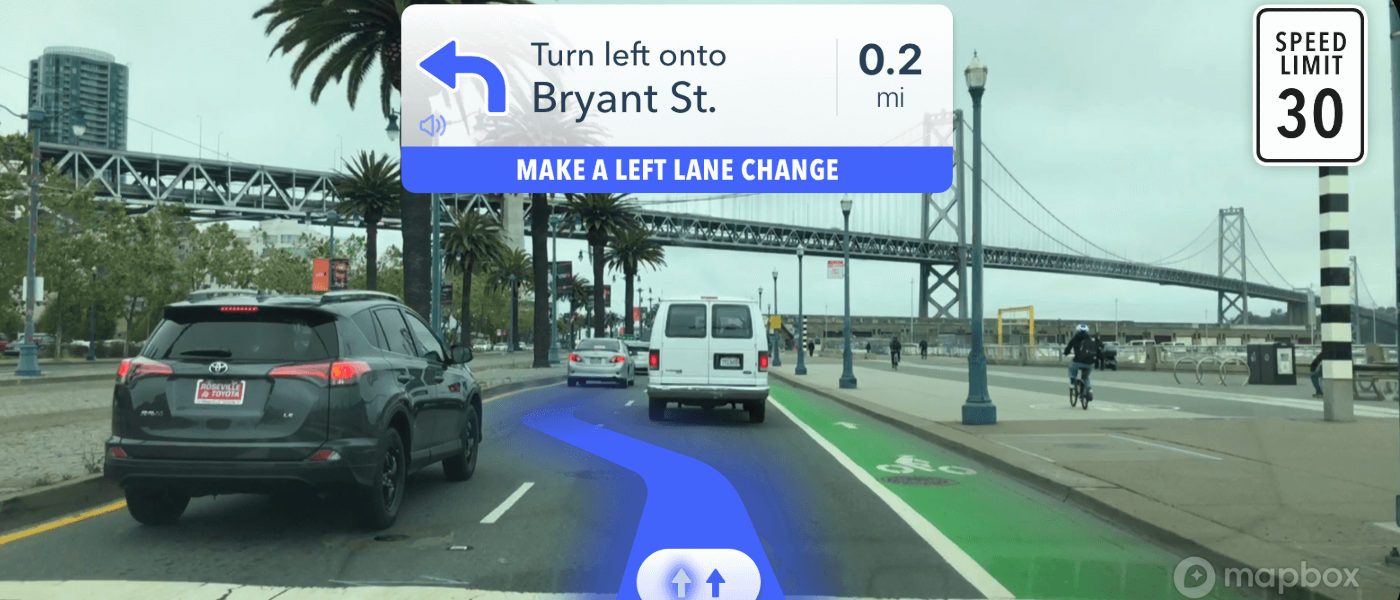
Его проблема в том, что он не нужен водителям. Несомненно, эта разработка на порядок интереснее самодвижущихся машин, которыми прожужжали все новости: такие машины купят несколько тысяч человек, а телефоны есть у миллионов водителей. Но авторы, как это часто бывает с технарями, для гениального ядра придумали яркий, но совершенно бесполезный обвес. Забыли одно из главных правил вождения: не отвлекаться. Все их линии и напоминания на практике не нужны.
Когда я за рулём, экран моего телефона выключен. Там работает навигатор и в правильные моменты он подсказывает: «поверните налево», «через триста метров направо». Никогда не удавалось оценить, сколько это — триста метров; порой приходилось резко тормозить и сдавать назад. Если прикрепить телефон к приборной панели, я начинаю его палить: контролировать скорость и время по GPS, смотреть на окрестности на карте. Читать уведомления из мессенджеров.
Поэтому AR, дополненная реальность, не нужна. Остальные части презентации тоже по-своему бесполезны. Предупреждения, например, либо избыточны и их игнорируешь — вспомните «динь» о превышении скорости в яндекс-картах, — либо редки и слишком неожиданны, чтобы вовремя среагировать. Картинки на сайте Vision SDK предлагают и третий вид уведомлений: слишком ярких и перегруженных, чтобы читать за рулём. Последний слайд в «Use Cases» особенно зловещ: внедрение системы приведёт к штрафам за то, что водители не роботы.
Когда-то я целый год смотрел ролики ру-чп и теперь при езде я вижу сотни собственных ошибок, которые могли бы привести к аварии. Отвлёкся на медиафасад. На узкой полосе мечусь между зеркалами и машиной впереди. Автобус справа закрыл сигнал светофора и я его предположил. Мчу по трассе и ожидаю, что пешеходы не самоубийцы. Перестраиваюсь влево и каждый раз жду, что влечу в машину либо в слепой зоне, либо впереди, когда проверяю эту зону.
Vision SDK захватывает воображение как обещание безопасного будущего. Водителю нужна помощь — но не в навигации: с ней справляются и обычные навигаторы. Этот технологический костыль приблизит то, о чём безосновательно грезят апологеты автономного транспорта: более безопасные и эффективные дороги. Для этого не нужно покупать новую машину и бояться, что встретишь непредсказуемый для искусственного интеллекта таз. Достаточно поставить две камеры сзади и спереди, запустить приложение и построить маршрут.
Главное в разработке — заткнуть внутреннего технаря и решать проблемы, а не предоставлять возможности. Например, не показывать, а говорить. Не «триста метров», а «перед забором». «Две минуты до съезда, перестройся вправо». Или «десять секунд», если машин вокруг мало. Это всё базовые улучшения, для которых не нужно камер. Vision SDK позволяет оценивать окружающую обстановку так, как не сможет никакой водитель, особенно усталый или в сумерках. «Впереди пешеход, притормози».
Обучение привычкам водителя, плюс данные с камер и автомобильных датчиков, плюс картография решат все затруднения, знакомые каждому водителю. Стоит ли разгоняться, или всё равно на светофоре стоять? Безопасно ли обгонять таз с прицепом, когда встречка далеко, но слепит фарами? Прервать обгон и встроиться между фурами? Быстрее ли соседняя полоса и точно ли там сейчас никого нет в слепой зоне? Сколько на этой дороге полос, не стоит ли принять чуть вправо? Тормозить или резко свернуть перед препятствием? Не влетит ли в меня обгоняющий, если я поверну налево?
Нужно не вываливать всё, что вычислили, а ненавязчиво подсказывать и, возможно, светить крупными, понятными индикаторами. Знаю, что превышаю скорость, но пора бы понять, что я люблю ездить плюс пять к ограничению, за которые не штрафуют. Если я в правой полосе, то зачем предлагать держаться правее? Линия маршрута нафиг не нужна, когда о повороте можно сказать голосом, а вот индикатор «можно обгонять» очень бы пригодился. Как и индикаторы безопасности перестроения на левом и правом боковых зеркалах.
Будут ли аварии из-за водителей, излишне положившихся на такого помощника? Конечно. Это предсказуемая угроза безопасности, с которой приложение, единственная задача которого — минимизация угроз, — должно бороться. Производители автономных машин сейчас думают, как водитель, следящий за правильностью решений, должен сигнализировать о своём внимании. Наша гипотетическая система тоже должна постоянно давать сигналы, что она следит за дорогой. При этом не раздражая водителя. Пониженная уверенность в данных — тоже красный флаг, который должен привлекать внимание. Эффективные сигнальные системы потребуют работы когнитивистов, которых не каждая компания догадается нанять. Это не лампочки на приборной панели, а интерфейс более высокого, интуитивного уровня.
Будущее вождения может быть построено на Vision SDK, если не произойдёт неминуемого. Я жду традиционного: Mapbox выпустит SDK и со временем переключит разработчиков на другие задачи. Несколько стартапов вырастут вокруг этой библиотеки и каждый запилит свою часть головоломки. Будут несколько приложений с платными подписками (потому что использование SDK стоит по доллару за человека), которые почти, но не совсем, помогают водителю, каждое по-своему. Пазл из них не сложится в идеального помощника. И в финале, как недавно нейронные сети для определения и маскировки лиц, технология обработки автомобильного видео станет ещё одним не взлетевшим технологическим прорывом.
Но я надеюсь, что когда-нибудь перестану волноваться об обгонах, перестроениях и пропущенных поворотах. Технологии возрождаются в лучшем виде после того, как полежат несколько лет в болоте разочарования. Вождение будет безопасным.